Ego Planner Reading Note
This is the reading note for ZJU-FAST-Lab/ego-planner-swarm: An efficient single/multi-agent trajectory planner for multicopters. (github.com)
This code repo is so complex that I can only go through a small part of it. In this reading note, I start from the process of launching the file: single_run_in_sim.launch. That is, what nodes does single drone in simulation environment uses and how do these nodes communicate with each other.
I also include detailed analysis of some important source file. For example, what are their core functions and what is the calling process of them.
[0] Draw node relationship graph
1 | rosrun rqt_graph |
Must be executed after launching ros shell script. It can draw the relation graph of all nodes and topics that are used.
[1] launch rviz with config file
from planner/plan_manage_launch/default.rviz
the config file is modified every time you change config in rviz.
[2] launch single_run_in_sim.launch
- Sub means subscribe
- Pub means publish
- Arrows → and ← represent the mapping relation of topics or nodes
For some important topics, I labeled the topic message type, the sender or receiver functions and the calling frequency. I drew some nodes and topics relation graphs with draw.io to make it more clearer.
1 launch node [map_generator/random_forest]
in source file planner/map_generator/random_forest_sensing.cpp
Sub1 topic odometry
unused
Pub1 topic “/map_generator/global_cloud”
through publisher _all_map_pub in function pubSensedPoints()
data source is cloudMap, which is generated in function RandomMapGenerateCylinder(),
which is called once in main()
There exist another similar function RandomMapGenerate(). The only difference between them is the original one generates square colomn instead of cylinder ones. They only differ in one line! (Why not merge them into one function?)
Pub2 topic “/map_generator/local_cloud”
unused
The topic is never used as relevant codes in function pubSensedPoints() is behind a return statement. What’s more, the relevant codes requires odom message which comes from “odometry” topic, which is not provided to the random_forest node.
Node-Topic Graph

2 include xml file advanced_param.xml
in which contains the following nodes:
2a launch node ego_planner/ego_planner_node as drone_$(arg drone_id)_ego_planner_node → [drone_0_ego_planner_node]
source files: ( all in planner/plan_manage/src/ folder)
- ego_planner_node.cpp (Just the launcher of fsm)
- ego_replan_fsm.cpp (Contains the finite state machine)
- planner_manager.cpp (Ego planner manager, used by fsm)
output is sent to screen
:bulb: This is the core node of ego planner. It has many dependencies as shown below. (in its CMakeLists.txt)
1 | catkin_package( |
brief summary of the above packages
plan_env: map reconstruction
path_searching: dynamic A* search
bspline_opt: bspline optimization
traj_utils: PolynomialTraj related function and visualization
Sub1 topic odom_world ← /drone_$(arg drone_id)_$(arg odometry_topic) ← “drone_0_visual_slam/odom”
ego_replan_fsm.cpp
<nav_msgs::OdometryConstPtr>
— remap in advanced_param.launch
with callback function odometryCallback()
which extract the received message to odom_pos_ & odom_vel_ & odom_orient_, then set have_odom_ true
Sub2 topic “/drone_$(drone_id - 1)_planning/swarm_trajs”
ego_replan_fsm.cpp
no use
only subscribe to this topic when there are swarm, not single drone
4 topics below are all contained in planner/src/grid_map.cpp
- grid_map/depth & grid_map/cloud – provide topics about the surrounded environment
- grid_map/odom & grid_map/pose – provide topics about their own position
In order to reconstruct the map, we need at least one topic from each type
Under simulation launch file,we use cloud & odom topics;
Under realworld launch file,we use depth & odom topics
In order to support RGB map reconstruction,we need to adjust data structures used by cloud & depth topic
Sub3 topic grid_map/depth ← /drone_$(arg drone_id)_$(arg depth_topic) ← “drone_0_pcl_render_node/depth”
:bulb: Depth topic is only used in realworld exploration
<sensor_msgs::Image>
— remap in advanced_param.launch & singhle_run_in_sim.launch
by subscriber depth_sub_ in file grid_map.cpp
IF pose_type_ == POSE_STAMPED: [← Chose in simlulation]
Sync depth with pose in sync_image_pose_ with callback function depthPoseCallback()
ELIF pose_type_ == ODOMETRY: [← Chose in realworld]
Sync depth with odom in sync_image_odom_ with callback function depthOdomCallback()
How to figure out the correspondence
grid_map.cpp has
node_.param("grid_map/pose_type", mp_.pose_type_, 1);advanced_param.xml has
<param name="grid_map/pose_type" value="1"/>advanced_param_exp.xml has
<param name="grid_map/pose_type" value="2"/>
grid_map.h has
enum { POSE_STAMPED = 1, ODOMETRY = 2, INVALID_IDX = -10000 };
However, in realworld exploration, we use grid_map/depth instead of grid_map/cloud, so the two callback functions above are never called in realworld exploration process.
Sub4 topic grid_map/cloud ← /drone_$(arg drone_id)_$(arg cloud_topic) ← “drone_0_pcl_render_node/cloud”
:bulb: Cloud topic is only used in simulation
<sensor_msgs::PointCloud2>
— remap in advanced_param.launch & singhle_run_in_sim.launch
by subscriber indep_cloud_sub_ in file grid_map.cpp
with callback function GridMap::cloudCallback()
cloudCallback() function conclusion:
Change messages of type
sensor_msgs::PointCloud2to latest_cloud of typepcl::PointXYZRGB(In order ot support RGB map reconstruction, I changePointXYZtoPointXYZRGBtype)Check if odom message is updated、if latest_cloud is null, if camera_pos is null
Iterate through all point in
latest_cloud,inflate each point, setmd_.occupancy_buffer_inflate_[idx_inf] = rgb(Originally it is 1,I changed it torgbvalue)idx_infis calculated by coordinate ofpoint,I wonder why the author not use 3-d array, it is more intuitive
Sub5 topic grid_map/odom ← /drone_$(arg drone_id)_$(arg odometry_topic) ← “drone_0_visual_slam/odom”
<nav_msgs::Odometry>
— remap in advanced_param.launch & singhle_run_in_sim.launch
by subscriber odom_sub_ without callback function (Not separate callback functions,because odom_sub_ and depth_sub_ is merged into sync_image_odom_ and callback together)
or indep_odom_sub_ with callback function GridMap::odomCallback()
odomCallback() simply extract camera_pos from nav_msgs::OdometryConstPtrand set has_odom_ = true
Sub6 topic grid_map/pose
TO DO
:exclamation: In simulation, map reconstruction module (mainly in grid_map.cpp) uses “grid_map/cloud”. In realworld, however, it uses “grid_map/depth” . Why simulation cannot use “grid_map/depth” ???
Sub7 topic planning/broadcast_bspline_to_planner ← “/broadcast_bspline”
ego_replan_fsm.cpp
<traj_utils::BsplinePtr>
— remap in advanced_param.launch
with callback function EGOReplanFSM::BroadcastBsplineCallback()
Brief Summary: TO DO
Sub8 topic “/move_base_simple/goal” or “/traj_start_trigger”
ego_replan_fsm.cpp
How I confirm the topic is the latter:
- subscribe to which topic depends on value of target_type_, the value is got from:
- ←
nh.param("fsm/flight_type", target_type_, -1);(ego_planner_fsm.cpp) - ←
<param name="fsm/flight_type" value="$(arg flight_type)" type="int"/>(advanced_param.xml) - ←
<arg name="flight_type" value="2" />(single_run_in_sim.launch)
which means target_type_ == TARGET_TYPE::PRESET_TARGET, so the real subscription is “/traj_start_trigger”
<geometry_msgs::PoseStampedPtr>
with callback function EGOReplanFSM::triggerCallback()
which set have_trigger_ = true, and initialize init_pt_
Pub1 topic grid_map/occupancy
no use
Pub2 topic grid_map/occupancy_inflate → “/drone_0_ego_planner_node/grid_map/occupancy_inflate”
<sensor_msgs::PointCloud2>
— only convert from local node namespace to global
:sunny: This is the reconstructed map that is shown in rviz
visCallback() includes publishMapInflate() and publishMap();
which publish grid_map/occupancy and grid/occupancy_inflate, only the former one is used
Pub3 topic “/drone_$(drone_id)_planning/swarm_trajs”
ego_replan_fsm.cpp
no use
Pub4 topic planning/broadcast_bspline_from_planner → “/broadcast_bspline”
ego_replan_fsm.cpp
<traj_utils::Bspline>
— remap in advanced_param.launch
by publisher broadcast_bspline_pub_ in function EGOReplanFSM::publishSwarmTrajs()
which has no specific frequency, but is called in FSM
Pub5 topic “planning/bspline”
TO DO
Pub6 topic “planning/data_display”
TO DO
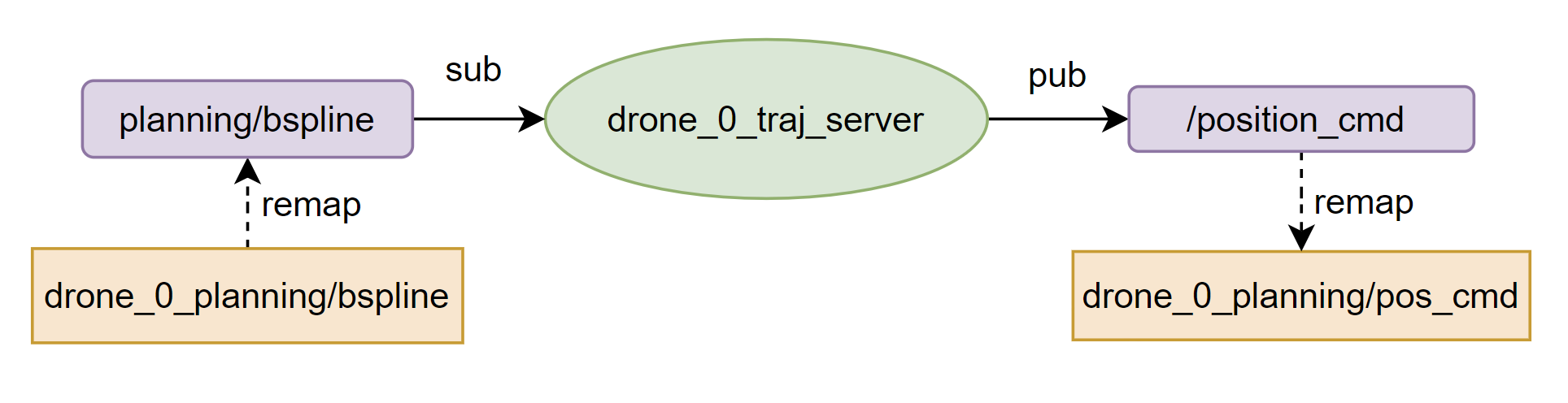
2.3 launch node ego_planner/traj_server as [drone_$(arg drone_id)_traj_server] → [drone_0_traj_server]
in source file planner/plan_manage/traj_server.cpp
output is send to screen
Sub1 topic planning/bspline ← drone_$(arg drone_id)_planning/bspline ← “drone_0_planning/bspline”
<traj_utils::BsplineConstPtr>
— remap in single_run_in_sim.launch
with callback function bsplineCallback()
Pub1 topic /position_cmd → drone_$(arg drone_id)_planning/pos_cmd → “drone_0_planning/pos_cmd”
<quadrotor_msgs::PositionCommand>
— remap in single_run_in_sim.launch
through publisher pos_cmd_pub in function cmdCallback(), which is callback function of Timer cmd_timer, frequency 100Hz
data source is cmd, generated in cmdCallback()
Brief Summary of cmdCallback():
- check
receive_traj_to see if received bspline messages, variable defined inbsplineCallback() - if
curr time < traj duration- then calculate
cmd.pos & vel & accby DeBoor AlgorithmevaluateDeBoorT(). And calculate yaw bycalculate_yaw()(a self-defined function) - else, hover at the end point of the trajectory,
cmd.vel & acc = 0,yawkeep unchanged
- then calculate
- combine variables above into
cmd, and publish it throughpos_cmd_pubto /position_cmd
Node-Topic Graph
💡 B-spline curve is shaped by control points and basic functions. Basic functions are defiend by knot vector and curve order k, which influence the continuity and shape of the curve.
1.4.2 B-spline curve (mit.edu)
2.4 launch xml file ego_planner/launch/simulator.xml
in which contains the following nodes:
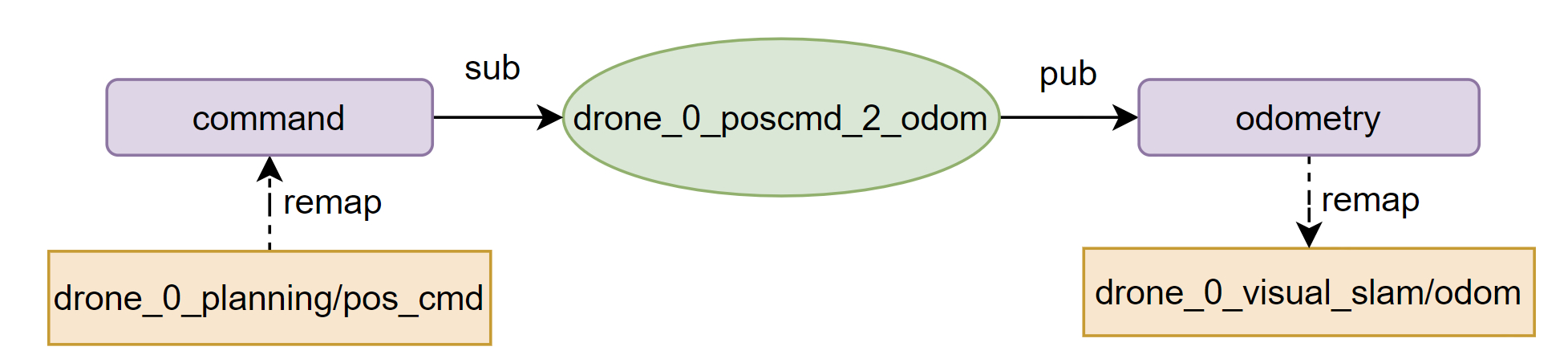
2.4a launch node poscmd_2_odom/poscmd_2_odom as drone_$(arg drone_id)_poscmd_2_odom → [drone_0_poscmd_2_odom]
node source file is uav_simulator/fake_drone/poscmd_2_odom.cpp
Sub1 topic command ← drone_$(arg drone_id)_planning/pos_cmd ← “drone_0_planning/pos_cmd”
<quadrotor_msgs::PositionCommand>
— remap in simulator.xml
with callback function rcvPosCmdCallBack(), which is called by ros::spinOnce() at a frequency of 100Hz.
Pub1 topic odometry → drone_$(arg drone_id)_$(arg odometry_topic) → “drone_0_visual_slam/odom”
<nav_msgs::Odometry>
— remap in simulator.xml
through publisher _odom_pub in function pubOdom(), which runs in a while loop at a frequency of 100Hz.
Node-Topic Graph
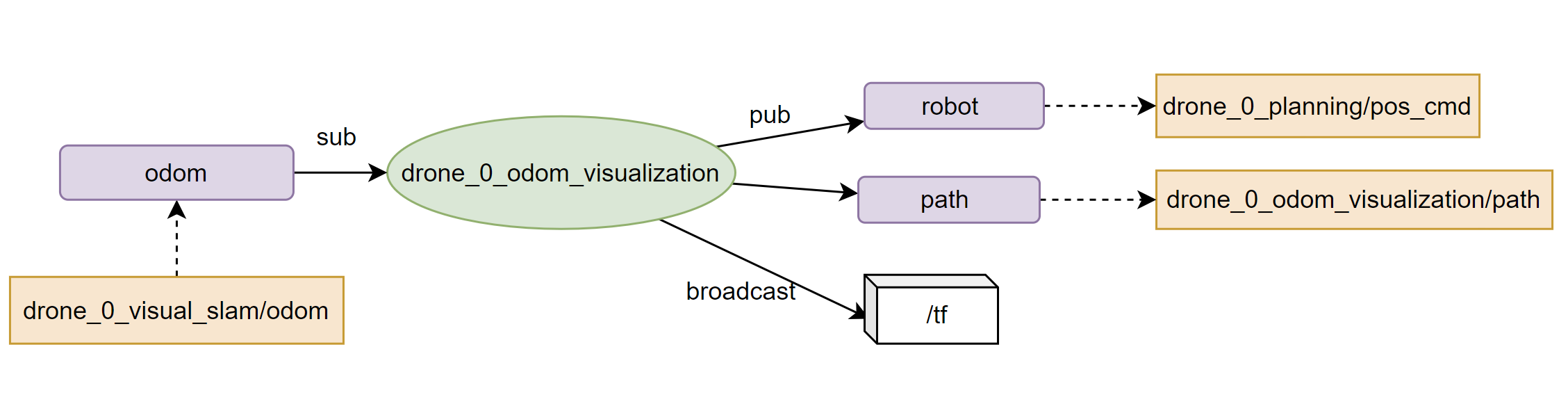
2.4b launch node odom_visualization/odom_visualization as drone_$(arg drone_id)_odom_visualization → [drone_0_odom_visualization]
node source file is uav/simulator/Utils/odom_visualization/odom_visualization.cpp
Sub1 topic odom ← drone_$(arg drone_id)_visual_slam/odom ← “drone_0_visual_slam/odom”
with callback function odom_callback() called by ros::spin()
💡 Difference between ros::spin() & ros::spinOnce() and usage of ros::Rate(), see at [Callbacks and Spinning - ROS Wiki](https://wiki.ros.org/roscpp/Overview/Callbacks and Spinning)
Sub2 topic cmd
no use
Pub1 topic robot → “drone_0_odom_visualization/robot”
<visualization_msgs::Marker>
by publisher meshPub, in function odom_callback() called by ros::spin()
💡 If topic begin with “/”, then it’s a global topic, other nodes can subscribe to it by its original name. Otherwise, it’s a local variable, other nodes need to subscribe to “
❓ Need Verification: It seems that in xml and launch files, every topic name without a “~” prefix is regarded as global topic.
Pub2 topic path → “drone_0_odom_visualization/path”
<nav_msgs::Path>
by publisher pathPub, in function odom_callback() called by ros::spin()
Pub3…N topic pose, velocity, covariance…
no use
💡 If a published topic is not subscribed by any node, it will not be visible on the rqt_graph. However, if a topic is subscribed by rviz node, although there is not a connecting line from topic to rviz, the topic will be visible.
❓ The rviz node in rqt_graph is shown as n__rviz and only connect a line to ‘/tf’ (cuboid like stuff). Don’t know why.
Pub4 tf::Transform “/tf”
by tf::TransformBroadcaster* broadcaster, in function odom_callback() called by ros::spin()
from line 363 of odom_visualization.cpp
🔆 This is not a common ros topic, but do provide transform information to rviz. Need to learn more if time allows.
2.4c launch node local_sensing_node/pcl_render_node as drone_$(arg drone_id)_pcl_render_node → [drone_0_pcl_render_node]
node source file depends on whether to enable cuda,
if so, use uav_simulator/local_sensing/pcl_render_node.cpp;
else use uav_simulator/local_sensing/pointcloud_render_node.cpp
I change the two file names to pcl_render_node_cuda.cpp and pcl_render_node_cpu.cpp in yang-d19/ego-planner-pro: Based on ego planner, enabled colored maping (github.com)
Send output to screen for review, by specify [output = “screen”]
Ego Planner Reading Note