Lab8
Task B: Orientation Control
Your robot must start at the designated line (<4m from the wall), drive fast forward, and when the robot is within 3ft (914mm = 3 floor tiles in the lab) from the wall, initiate a 180 degree turn.
Video
How to achieve this
1. Adjust range of gyroscope
The default range for the gyroscope of SparkFun 9DoF IMU is +-250 degrees per second, which is enough for normal rotation. However, in the lab8, the maximum angle speed can reach more than 700 dps, so I have to adjust the full range of the sensor.

According to the datasheet, it has 4 different full-scale ranges to choose for gyroscope. I use the following code to select mode 2,
ICM_20948_fss_t myFSS;
myFSS.g = dps1000; // (ICM_20948_GYRO_CONFIG_1_FS_SEL_e)
// dps250
// dps500
// dps1000
// dps2000
myICM.setFullScale(ICM_20948_Internal_Gyr, myFSS);
2. Angle PID controller
I choose these parameters for the angle pid controller,
PIDParam angle_param = {
.Kp = 50,
.Ki = 5,
.Kd = 15
};
The pid controller that generate orientation control values,
std::pair<int16_t, int16_t> angle_pid(int16_t error) {
angle_var.integral += angle_param.Ki * error;
int16_t control = angle_param.Kp * error
+ angle_param.Kd * (error - angle_var.prev_error)
+ angle_var.integral;
if (control >= MAX_CONTROL) control = MAX_CONTROL;
if (control <= MIN_CONTROL) control = MIN_CONTROL;
angle_var.prev_error = error;
return std::make_pair(-control, control);
}
3. Control straight power and orientation at the same time
During this lab, we need to keep the car moving straightly and doing a sharp U turn then quickly moving back. The function forwardKeepYaw is designed for this purpose:
void forwardKeepYaw(int16_t setpoint_yaw, int16_t yaw, int16_t straight_control) {
std::pair<int16_t, int16_t> two_controlls = angle_pid(yaw - setpoint_yaw);
// if turning component is too large, straight control cannot be applied too much on motors.
int16_t max_straight_component = min(MAX_CONTROL - two_controlls.first, MAX_CONTROL - two_controlls.second);
int16_t straight_component = min(straight_control, max_straight_component);
ctrl_record.left_control = two_controlls.first + straight_component;
ctrl_record.right_control = two_controlls.second + straight_component;
left_wheel_control(two_controlls.first + straight_component);
right_wheel_control(two_controlls.second + straight_component);
}
4. Start turning at given distance
if (distance > goal_distance) {
forwardKeepYaw(goal_yaw, yaw, 900);
}
else {
is_turning = true;
turn_start_ms = curr_ms;
turn_end_yaw = yaw - 180.0;
goal_yaw = turn_end_yaw;
}
When current distance is larger than required turning distance, the car moves forward with 90% of throttle. And it immediately set its goal yaw angle to the opposite direction when it reaches within the distance limit.
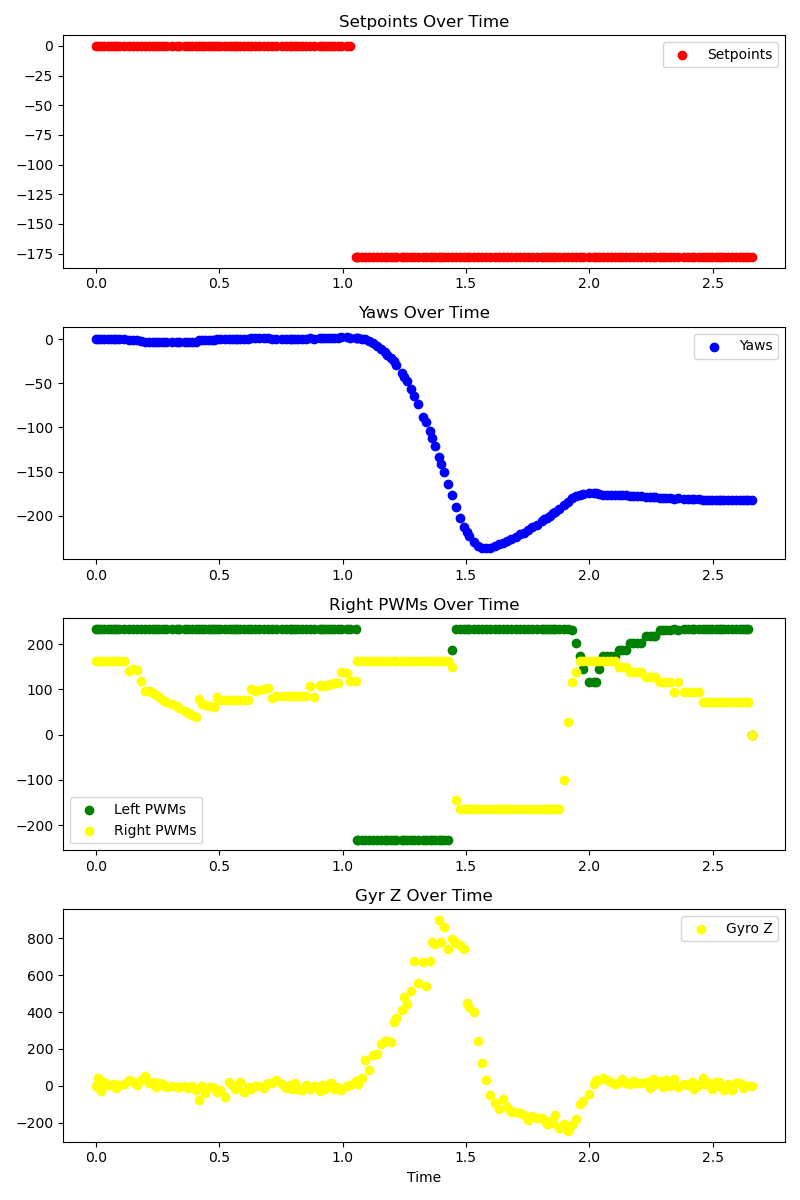
5. Graphs of recorded data
The graph is drawn by the following code,
def plot_yaw_graph():
timestamps_s = [t / 1000.0 for t in timestamps_ms]
fig, (ax1, ax2, ax3, ax4) = plt.subplots(4, 1, figsize=(8, 12)) # 3 subgraphs
ax1.scatter(timestamps_s, setpoint_yaws, label='Setpoints', color='red')
ax1.set_title('Setpoints Over Time')
ax1.legend()
ax2.scatter(timestamps_s, yaws, label='Yaws', color='blue')
ax2.set_title('Yaws Over Time')
ax2.legend()
ax3.scatter(timestamps_s, left_pwms, label='Left PWMs', color='green')
ax3.set_title('Left PWMs Over Time')
ax3.legend()
ax3.scatter(timestamps_s, right_pwms, label='Right PWMs', color='yellow')
ax3.set_title('Right PWMs Over Time')
ax3.legend()
ax4.scatter(timestamps_s, gyr_zs, label='Gyro Z', color='yellow')
ax4.set_title('Gyr Z Over Time')
ax4.set_xlabel('Time') # only set x label on the bottom subgraph
ax4.legend()
plt.tight_layout()
plt.show()